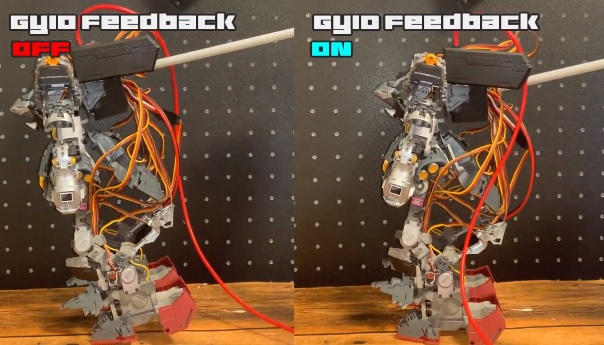
重力に魂を引かれた歩き方から脱却すべく、ジャイロセンサーによるフィードバック(PID制御)を施しました。
前回からの改善点
-モーターをパワーアップ(MG90D→MG92B)
-ジャイロセンサーによる姿勢制御
-滑らないよう足裏にラバー装着
-基板をバックパックに内蔵して重心のブレを安定化
 MG MSN-04 サザビー
MG MSN-04 サザビー重力に魂を引かれた歩き方から脱却すべく、ジャイロセンサーによるフィードバック(PID制御)を施しました。
-モーターをパワーアップ(MG90D→MG92B)
-ジャイロセンサーによる姿勢制御
-滑らないよう足裏にラバー装着
-基板をバックパックに内蔵して重心のブレを安定化


コメント