ロボットを開発する前に、まずコンセプトを決める必要があります。コンセプトによって開発の方向性が大きく変わりますので、コンセプトは非常に重要です。
1号機で実現を目指しているのは、ガンダムのアニメに出てくるような、カッコいい見た目と動きをするロボットです。ROBO-ONEのような競技に出場する事が目的ではありませんので、頑丈な骨格や強力なモーターは必要ありません。
カッコいい見た目と動きを実現する事に全力を注ぎます。
また、ガンプラ好きな方々であれば簡単に真似して頂けるよう、なるべくローコストな設計にしたいと思います。
それらを踏まえ、1号機では
- 見た目がカッコいい
- 動きがカッコいい
- ローコスト
の3点をコンセプトとし、ロボットを設計していきます。
外装
最優先事項であるカッコいい見た目を実現するため、外装はMGガンプラをベースにすることにします。

MGガンプラをベースにすることのメリットは以下があげられます。
- 見た目がカッコいい
- 外装を3Dプリンティングで作るコストがかからない
- 二足歩行ロボットとしては小さいので内部フレームの材料費を抑えることができる
- プラスチック製で重量が軽いので安価な小型サーボを使うことができる
カッコよさとローコストを両立できる良いアイデアだと考えましたが、懸念はMGガンプラのサイズで二足歩行が実現できるかどうかでした。
ちょっと調べてみたところ、こちらのようにガンプラにモーターを組み込んで動かしている方がいましたので、MGガンプラを使って二足歩行させることはできそうだという直観はありました。
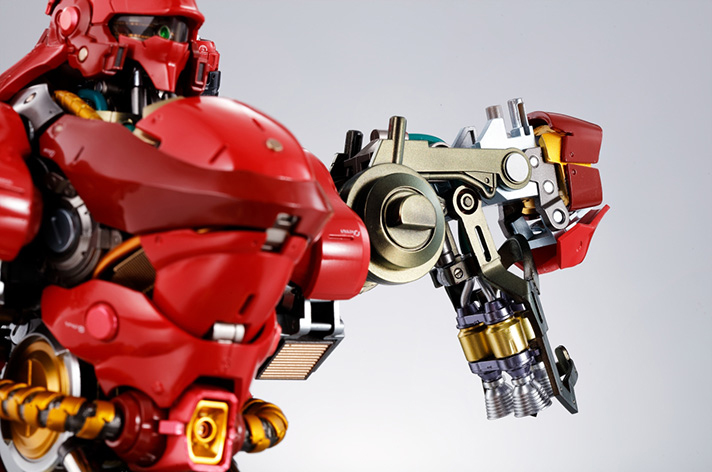
少しでもサイズが大きい方が無理なくサーボモータを内蔵することができますので、今回はMGガンプラの中でも大型のMG MSN-04 サザビー Ver.Kaを採用することにしました。
内骨格
スタイリッシュな見た目と動きを実現するため、原作と同様、駆動装置を内蔵する独立した内骨格に装甲を被せるムーバブルフレームを採用します。
ムーバブルフレームを採用することにより、関節可動域を計算・検討して装甲やパーツ同士が干渉しないようなデザインを考えることができます。
マイコン
お手軽に開発ができるようArduino Nanoを採用します。
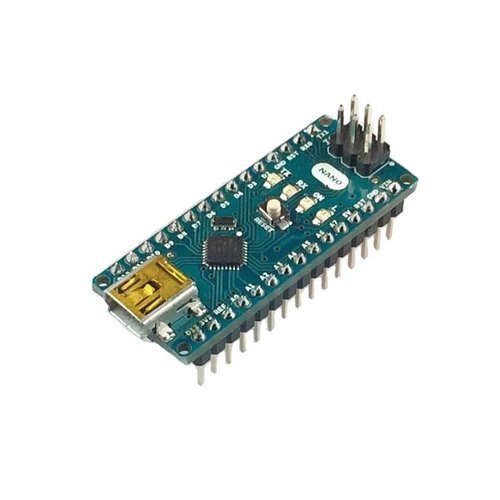
Arduino Nanoであればサイズが非常に小さいので、MGガンプラに内蔵することができます。
また開発環境も整っており、オープンソースの様々なライブラリを利用したり、センシングデバイスを接続して制御したりといった拡張性が高い点もメリットです。
市販のロボット専用のマイコンを使うこともできますが、それらは価格が高いのと、ロボットの制御の根幹部分を自分でプログラミングして理解することは、後々のスタイリッシュな動きを実現するために必要だと考えましたので、今回はこの構成としました。
サーボモータ
ホビー用の小型サーボの定番の90Rよりややトルクの高い92Rを採用します。

このサーボモータはトルクが2.5kg /cm(4.8v)と、一般のロボット用サーボモータと比べると1/4くらいの力しかでません。しかし、一般のロボットが3kg程度の総重量があるのに対して、1号機は800g程度の総重量に抑える予定ですので、このトルクでも十分なはずです。
価格も一般のロボット用サーボモータが5000円以上するのに対して、SG92Rは500円程度と約1/10にコストダウンできるのも大きなメリットです。
今回のロボットでは20個程度のサーボモータを使用する予定ですので、その金額差は9万円にもなります。
さらに腕や頭はより小さいトルクでも動かすことができますので、それらの個所にはRC450を採用します。

こちらは92Rよりさらに小さく、トルクは0.7kg/cm (4.8V)ほどで、金額は92Rと同じくらいです。
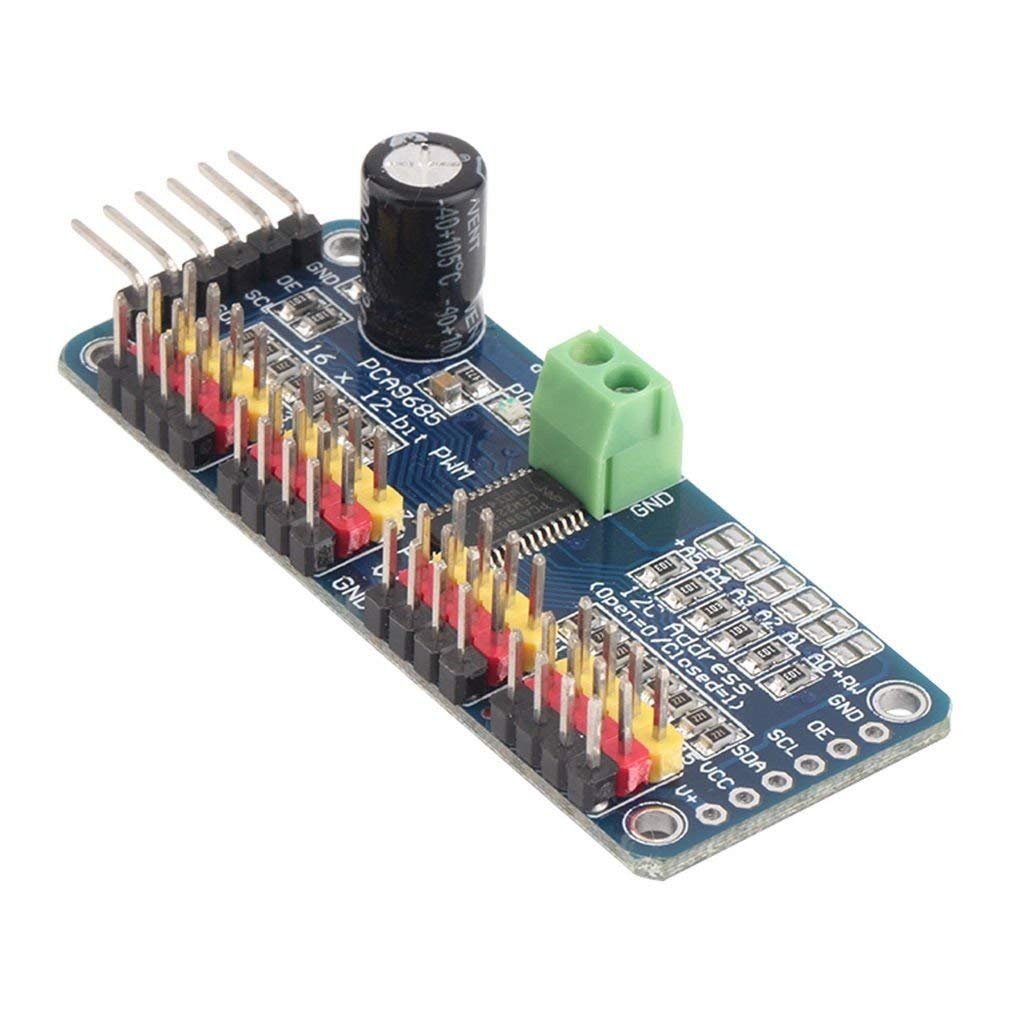
サーボモータの制御にはPCA9685 16チャンネル 12-ビット PWM Servo モータードライバを使います。Arduino NanoとI2Cでつないで最大16個のサーボモータを制御することができます。
バッテリー
SG92Rは5V駆動なので5Vのバッテリーが必要なのですが、ロボット向けに使われているLi-PoやLi-Feは6.6V~7.4Vなので、SG92Rには使えません。
バッテリーの選定はとりあえず置いておくとして、Amazonで5V出力のモバイルバッテリーを購入し、まずはこちらで開発を始めることにしました。(しかしこれが後々問題となります…。)

コメント
Great post.
I like the helpful info you provide in your articles.
I will bookmark your blog and check again here frequently.
I’m quite sure I’ll learn lots of new stuff right here! Good luck for the next!
Asking questionns are in faft nicce thjng if you are
nnot understanding something totally, however this article gives
goiod unjderstanding yet.
Thanks for finally writing about > ガンプラを改造した二足歩行ロボット1号機のコンセプト
| アナハイム・ロボティクス / ANAHEIM Robotics < Loved it!