
現在想定しているハードウェア構成を元にいきなり設計してしまうと、万が一うまく動かなかった場合の手戻りが非常に大きくなってしまいます。3D CADで設計を開始する前に、現在のハードウェア構成+MGガンプラで二足歩行ロボットを本当に実現できるか原理試作と検証をしました。
原理試作
材料
材料は以下の記事で紹介したものに加えて

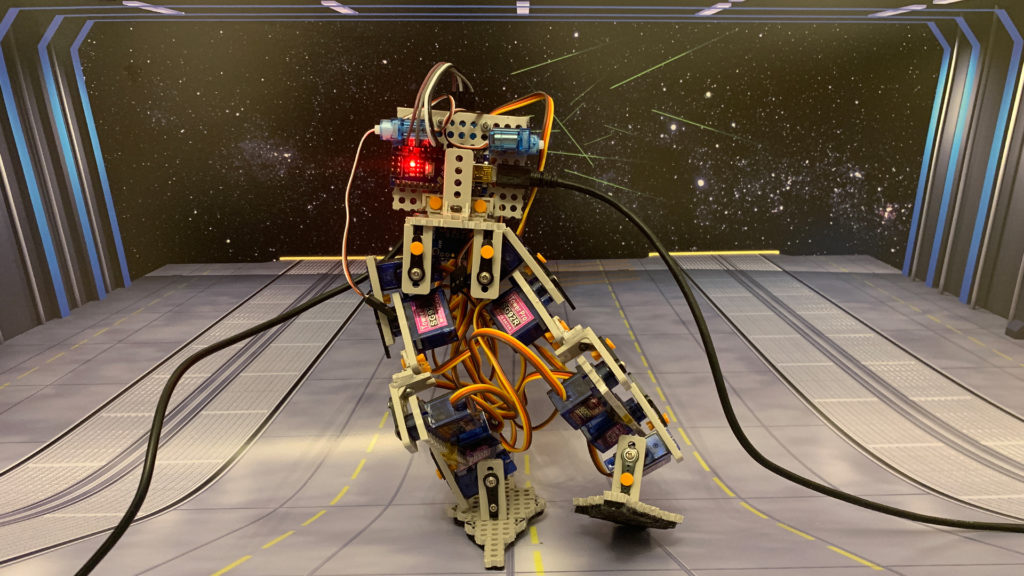
こちらのタミヤのユニバーサルプレートを使いました。
こちらのユニバーサルプレートは穴が開いているので、ニッパーでカットしたり、ピンやねじでプレート同士を固定したり外したりといったことが簡単にできますので、原理試作におすすめです。
作り方
原理試作の作り方は以下の動画で詳しく解説していますので見て下さい。
プログラミング
以下の書籍を参考にArduinoで二足歩行ロボットのプログラミングをしました。
動歩行させるのは難しいので、まずは静歩行させるプログラムを作りました。
試作結果
現在想定しているハードウェア構成で、なんとか無事にMGガンプラサイズのロボットを二足歩行させることができました。
次はMGガンプラの上半身を組み込んで歩かせることができるか実験します。

コメント