前回は二足歩行ロボットの下半身の試作をしました。

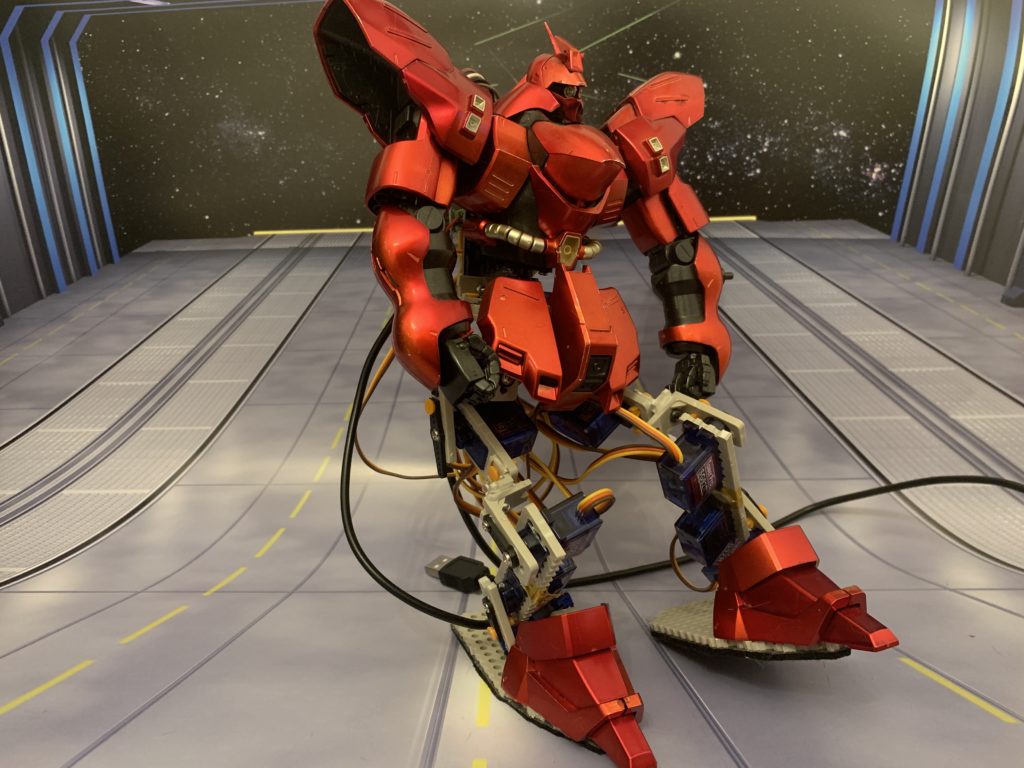
今回は前回試作した下半身にMGサザビーの上半身を合体して歩かせてみます。
結果
歩いている途中で後ろに倒れてしまいました…。

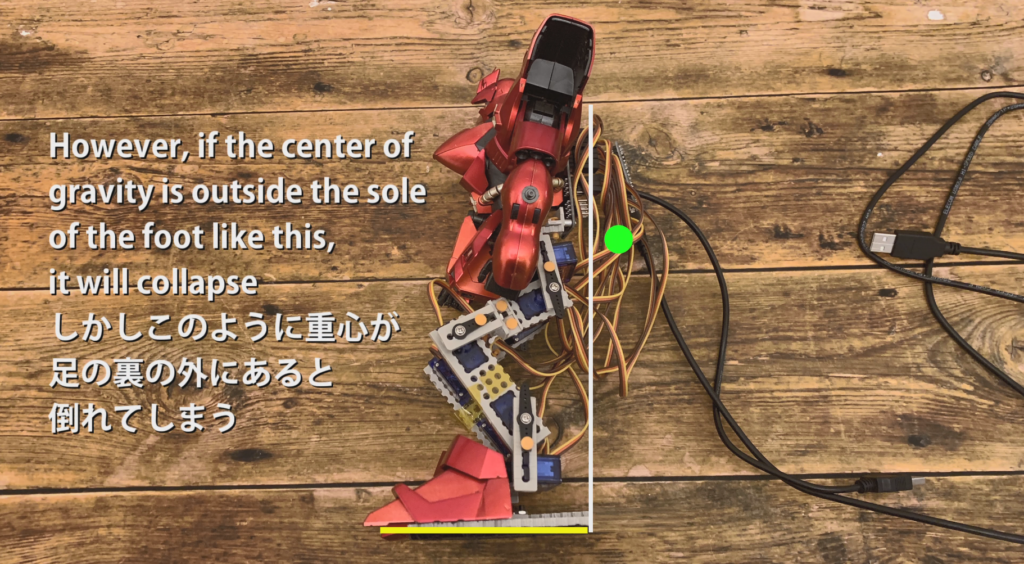
前回と比べると上半身が重くなったため、どうやら、歩行中に上半身の振れ幅が大きくなって、重心が足の裏の外に行ってしまい、転倒してしまうようです。
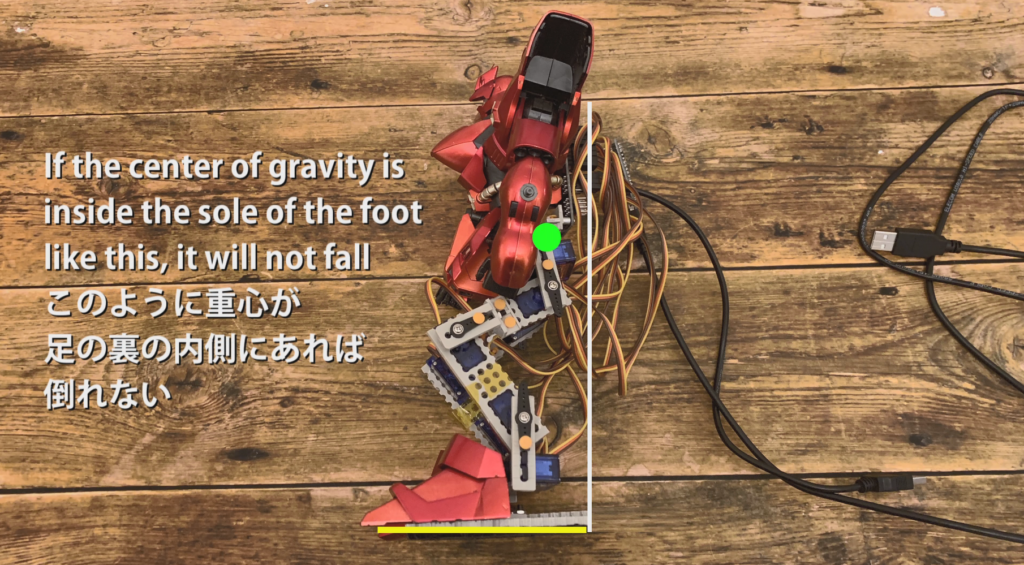
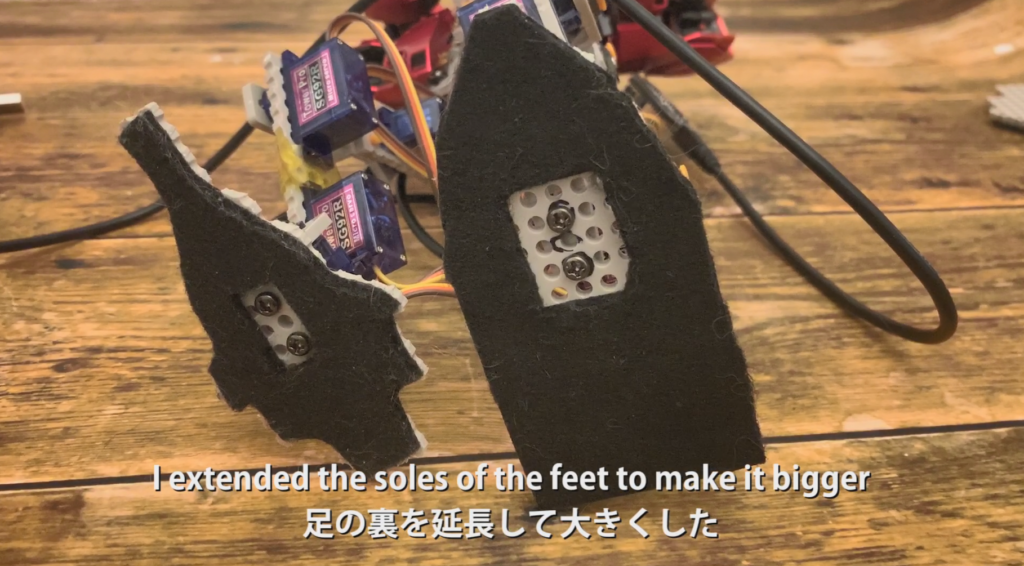
この問題を解決するため、足の裏の面積を増やして重心が足の裏の外に出ないようにしました。
その結果、後ろに倒れずに歩かせることができました。
 MG MSN-04 サザビー
MG MSN-04 サザビー前回は二足歩行ロボットの下半身の試作をしました。
今回は前回試作した下半身にMGサザビーの上半身を合体して歩かせてみます。
歩いている途中で後ろに倒れてしまいました…。
前回と比べると上半身が重くなったため、どうやら、歩行中に上半身の振れ幅が大きくなって、重心が足の裏の外に行ってしまい、転倒してしまうようです。
この問題を解決するため、足の裏の面積を増やして重心が足の裏の外に出ないようにしました。
その結果、後ろに倒れずに歩かせることができました。


コメント